CN45 – Thiết bị cảm biến phát hiện người trong vị trí những điểm mù của xe tải lớn – NON-BLIND
Nghiên cứu công nghệ giúp người điều khiển phương tiện giao thông nhận biết có vật thể, phương tiện, người tại điểm mù của xe, đặc biệt là các xe lớn, có tầm nhìn hạn chế.
Khi có phương tiện giao thông rơi vào điểm mù của xe, bộ cảm biến hiện diện sẽ nhận diện và báo động, ngoài ra thông qua màn hình thiết bị thể hiện các thông số cơ bản như ngưỡng phát hiện, mục tiêu bất động, mục tiêu chuyển động. Từ đó giúp người lái xe lớn có thể kiểm soát tầm nhìn ở các điểm mù và tránh gây ra tai nạn đáng tiếc.
- Công nghệ cảm biến Radar FMCW sử dụng tần số cao (mức GHz) bằng phương pháp quét; sóng điện từ được truyền từ anten đến mục tiêu cần đo sau đó phản xạ máy thu theo thời gian. Trong khoảng thời gian này, sự khác biệt về tần số sẽ xuất hiện làm chuông báo reo, có thể được tính toán thêm để có được khoảng cách từ đầu truyền tới đối tượng đo. Các dữ liệu đó sẽ được thu thập và hiển thị trên các phần mềm tính toán thông số.
- AIot :(ARTIFICIAL INTELLIGENCE OF THINGS) là một thuật ngữ để mô tả sự hội tụ của các hệ thống IoT và trí tuệ nhân tạo (AI) vào một mục tiêu chung: tạo ra dữ liệu hữu ích và rút ra những hiểu biết sâu sắc từ những dữ liệu đó. IoT là kết nối mọi người với mọi thứ trên thế giới thông qua mạng. AI thu thập các kỹ thuật để đào tạo máy tính hiểu dữ liệu mới dựa trên các mô hình của dữ liệu tương tự.
Trí tuệ nhân tạo (AI) sẽ phù hợp để triển khai với một hệ thống IoT ở hai vị trí :
- Triển khai AI tại trung tâm của hệ thống IoT : tạo ra các phân tích dự đoán hoặc cảnh báo bất thường.
- Triển khai AI ở biên của mạng IoT – nghĩa là ở hoặc gần các nút thiết bị – có thể giúp giảm băng thông và độ trễ trong khi tăng cường quyền riêng tư và bảo mật.
PHƯƠNG HƯỚNG LẮP RÁP HỆ THỐNG “NON-BLIND”
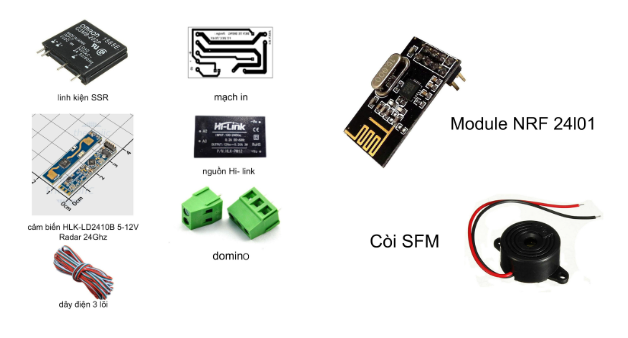
- Các thiết bị cần dùng:
- HLK-LD2410B 5-12V Cảm Biến Hiện Diện Con Người Radar 24Ghz
Chức năng: sử dụng sóng liên tục được điều chế tần số FMCW, để phát hiện mục tiêu là con người trong không gian đã định, kết hợp với xử lý tín hiệu radar, thuật toán cảm ứng cơ thể người chính xác, có thể xác định cơ thể con người trong chuyển động và trạng thái đứng yên, đồng thời có thể tính toán thông tin phụ trợ như khoảng cách đến mục tiêu.
- Domino Terminal KF128 5.08MM 2P & 3P
Chức năng: kết nối các thành phần trong thiết bị điện tử, cầu đấu dây có vít đấu tháo dây giúp cho việc gắn dây được dễ dàng hơn và được ứng dụng làm cọc nối nguồn trong các mạch điện tử, các thiết bị công suất nhỏ và vừa.
- HLK-PM12 Hi-Link 12V 3W -AC To DC
Chức năng : cung cấp nguồn điện cho các thiết bị điện
- Solid State Relay SSR G3MB-202P 5VDC
Chức năng: đóng ngắt tải AC công suất nhỏ với ưu điểm tốc độ đóng ngắt cao và không bị nhiễu hồ quang do việc đóng ngắt tiếp điểm cơ gây ra
- Arduino
Chức năng: xây dựng các ứng dụng điện tử có khả năng liên kết, tương tác với nhau tốt hơn
- Dây điện
Chức năng: dẫn điện kết nối các linh kiện
- Dây USB ( nếu sử dụng trên máy tính)
Chức năng: kết nối mạch điện với máy tính
- Mạch in
Chức năng: kết nối các linh kiện điện tử với nhau nhờ các đường dẫn điện
- Phần mềm tính toán các thông số :
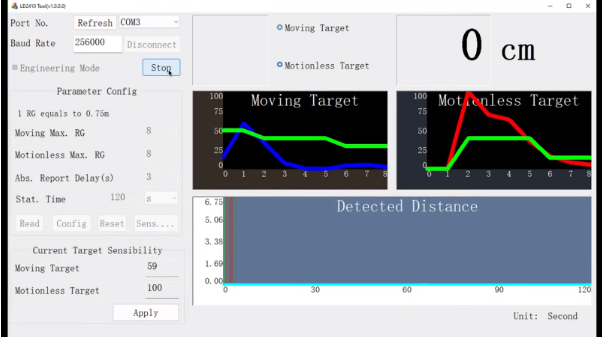
- LD2410 Tool ( trên máy tính )
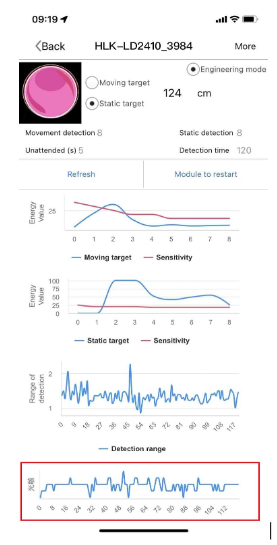
- LK radar tool ( trên điện thoại )
Chức năng: cập nhật, tính toán, xử lý và hỗ trợ việc cài đặt các thông số hiển thị trên màn hình máy tính/ điện thoại.
- Còi báo động SFM
Chức năng : tiếp nhận dữ liệu đã được phân tích từ phần mềm tính toán các thông số, nếu phát hiện chuyển động thì còi sẽ báo.
- Module nrf24l01 arduino
Chức năng: chip không dây truyền và nhận dữ liệu từ xa, giúp kết nối với các arduino và module khác, truyền tải thông tin dễ dàng
- Phần mềm LD2410 Tool trên máy tính :
- Phần mềm LK radar tool trên điện thoại:
 (Nguồn ảnh: Internet)
(Nguồn ảnh: Internet)
2. Phương hướng lắp ráp:
Bước 1: lắp các domino, linh kiện SSR và nguồn Hi – link vào mạch in
Bước 2: Phủ một lớp chì dưới mạch in để dẫn điện tốt hơn
Bước 3: lắp cảm biến HLK-LD2410B 5-12V Radar 24Ghz và nrf24L01 vào arduino, lập trình để Nrf24L01 giao tiếp SPI với arduino
Bước 4: Kết nối dây điện từ ardino trên đến domino 3 trên bảng in rồi gắn vào nguồn của xe để cung cấp điện
Bước 5: Lắp module NRF và còi vào arduino, đặt trong cabin xe. Lập trình để các module liên kết với nhau. (Khi hoạt động, cảm biến sẽ gửi tín hiệu đến arduino để điều khiến module NRF 1 phát tín hiệu cho module NRF 2, khi đó còi sẽ kêu)
Bước 6: Kết nối arduino trên vào nguồn điện của xe để cung cấp điện
Bước 7: kết nối dây USB từ arduino đến máy tính rồi mở phần mềm LD2410 Tool cài trên máy tính hoặc sử dụng bluetooth để kết nối cảm biến đến điện thoại mở ứng dụng LK radar tool trên điện thoại
Bước 8: Xem các thông số, dữ liệu trên màn hình, cài đặt các thông số để dễ dàng nhận diện


CN35 – Ứng dụng tự động báo vị trí xe máy khi bị tai nạn qua SMS trên hệ điều hành Android (Accident Warning)

CN55 – Nâng cao kiến thức an toàn giao thông cho học sinh thông qua các trò chơi E – learning.
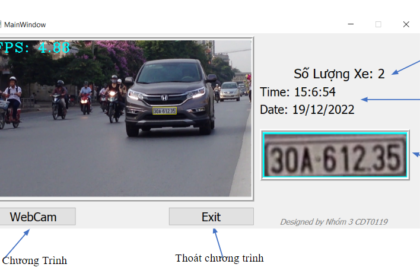
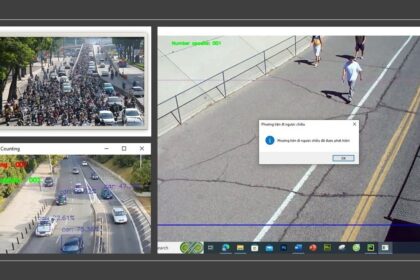
CN05 – Nhận diện biển số xe sử dụng thuật toán Yolo kết hợp với Tracker đếm số lượng xe từ khung biển số
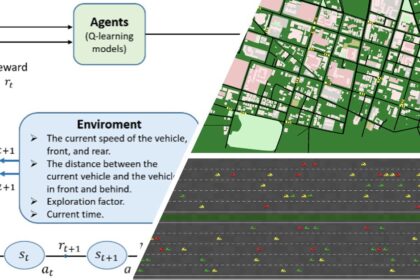
CN34 – Ứng dụng phương pháp học tăng cường đa tác tử cho bài toán giảm ùn tắc giao thông

CN49.1 – GT SMART – Hệ thống giám sát an toàn đường bộ và giảm thiểu ùn tắc giao thông

CN49.3 – Máy bay không người lái khảo sát và đảm bảo an toàn giao thông đường bộ, đường sắt